Limo: Lidar-Monocular Visual Odometry 安装与运行


How to SSH into Server Without Entering Password? ## Enable SSH on Remote Side ```sh sudo vim /etc/ssh/sshd_config PermitRootLogin no # ...
Read more »
解决X11客户端运行图形界面中文乱码问题 ```sh sudo apt install fonts-wqy-microhei fonts-wqy-zenhei ```
Read more »
How to solve the Problem: manpath: can't set the locale; make sure $LC_* and $LANG are correct
Read more »
# create a new repository on the command line ```sh echo "# DORBSLAM" >> README.md git init git add README.md git commit -m...
Read more »
## VSCode "go to definition" not working - Open Setting: check: ```sh C_Cpp.intelliSenseEngine ``` Set it from disable to ...
Read more »
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution)
Read more »
# Mount Samba Share in Linux This tip provides the necessary steps to mount a SMB share using Ubuntu.
Read more »
## c++: internal compiler error: Killed (program cc1plus)
Read more »
# Descriptionn ```sh conda create -n CONDA_ENV Solving environment: failed with repodata from current_repodata.json, will retry with next...
Read more »

# VDO-SLAM: A Visual Dynamic Object-aware SLAM System --- # Resources - Github: https://github.com/halajun/VDO_SLAM - [Paper](https://arxiv...
Read more »![How to compile and run ORB-SLAM3? [ORB-SLAM3 运行示例]](https://raw.githubusercontent.com/yubaoliu/assets/e8b300824d2a6a444c520ef2b54c1bce05335860/ORBSLAM3_main_system.png)
# Resources - Official Github: https://github.com/UZ-SLAMLab/ORB_SLAM3 - My clone version: https://github.com/yubaoliu/ORB_SLAM3 - Youtu...
Read more »![RGB-D SLAM in Dynamic Environments Using Static Point Weighting [Reading Seminar]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/static_weight_overview.png)
[toc] # 2017 - RGB-D SLAM in Dynamic Environments Using Static Point Weighting **contributions**: • A novel efficient static weighting m...
Read more »![DynaSLAM: Tracking, Mapping and Inpainting in Dynamic Scenes [Reading Seminar]](https://raw.githubusercontent.com/yubaoliu/assets/image/DynaSLAM_overview_fig1.png)
[toc] # 2018-DynaSLAM: Tracking, Mapping and Inpainting in Dynamic Scenes **Problem solved: scene rigidity assumption** The **assumptio...
Read more »![Real-time voxel based 3D semantic mapping with a hand held RGB-D camera [SLAM Project]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/3d_semantic_mapping_rgbd.png)
# Project - [Real-time voxel based 3D semantic mapping with a hand held RGB-D camera](https://drive.google.com/file/d/1Uk5YLMyoyMGMkE8FtJCN...
Read more »![2020-Dynamic ORB SLAM [Reading Seminar] [Open Source]](https://github.com/bijustin/YOLO-DynaSLAM/blob/master/imgs/Dyna_yolo.png?raw=true)
[toc] # 2020-Dynamic ORB SLAM **About**: Paper: [Dynamic ORB SLAM](https://github.com/bijustin/YOLO-DynaSLAM/blob/master/dynamic-orb-sl...
Read more »![Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment [论文阅读]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/Dynamic-SLAM_SLAM_module.png)
[toc] # 2020 Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment **contributio...
Read more »![A benchmark for the evaluation of RGB-D SLAM systems (ATE/RPE) [论文阅读]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/TUM_benchmark.png)
# 2012-A benchmark for the evaluation of RGB-D SLAM systems 视觉SLAM:算法精度评价指标(ATE、RPE) **数据集格式** All data was recorded at full resolut...
Read more »![2020 Semantic SLAM With More Accurate Point Cloud Map in Dynamic Environments [论文阅读]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/Fan_semantic_slam_point_cloud_overview.png)
[toc] # 2020 Semantic SLAM With More Accurate Point Cloud Map in Dynamic Environments 本文针对视觉SLAM的静态世界假设问题,目标是在Point Clout Map 中尽可能去除动态物体。...
Read more »![DSLAM: RGB-D SLAM in Dynamic Environments Using Points Correlations [论文学习]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/DSLAM-overview.png)
# 2018-RGB-D SLAM in Dynamic Environments Using Points Correlations 又称为DSLAM. The main contributions of this paper are: - The integrat...
Read more »![DM-SLAM: A Feature-Based SLAM System for Rigid Dynamic Scenes [论文阅读]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/DM-SLAM-Overview.png)
[toc] # 2020-DM-SLAM: A Feature-Based SLAM System for Rigid Dynamic Scenes 本文所解决的问题是视觉里程计中的 静态世界/物体假设 大体思想: - MaskRCNN 对物体进行分割,得到可能的动态物...
Read more »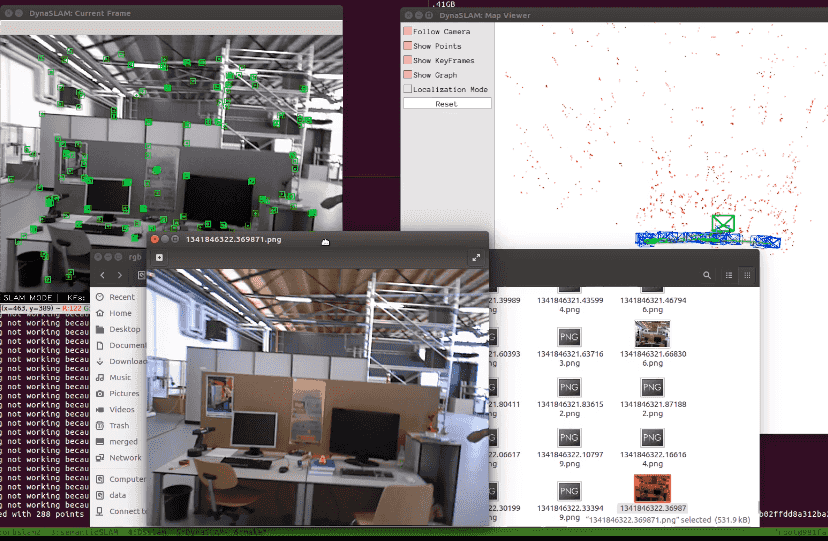
[toc] # 目标: - 理解DynaSLAM的主程序流程 - 理解DynaSLAM的核心算法 Youtube demo: https://www.youtube.com/embed/aiqLlyiriXI # 程序流程分析 ## 主程序流程 入口程...
Read more »
[toc] 如何安装CARLA 仿真环境? # Install CARLA 0.9.9 ```sh sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 92635A407F7A020C sud...
Read more »
# Problem: How to use animation inside Class member function in Colab? --- Colab 是谷歌开发的一款类似于Jupter notebook的编辑器,用Colab可以编写Python程序,进行深度...
Read more »
FlexBe Tutorial - Installation - Behaviors Repository - Using the Statemachine Editor - Execution
Read more »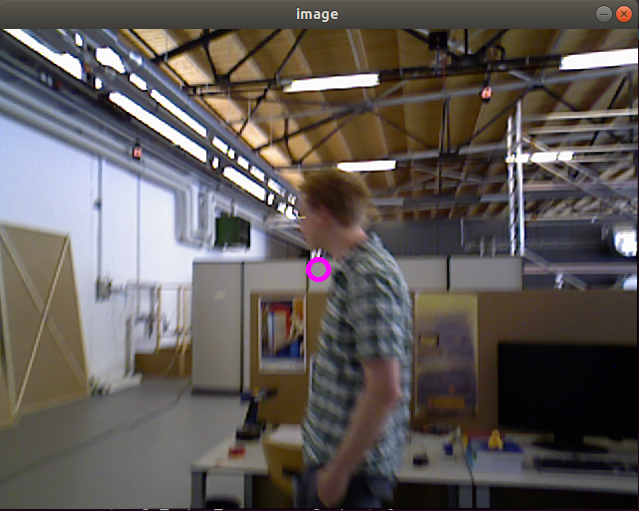
[toc] # Objective - Read and show image from bag file using C++ (使用ROS C++ 接口进行图像读取与显示) --- 网上有不少在ROS中使用Python的示例程序,但是我找了很久也没有找到C++版本的程...
Read more »![[MaskRCNN] Could not create cudnn handle: CUDNN_STATUS_INTERNAL_ERROR](https://raw.githubusercontent.com/yubaoliu/assets/image/MaskRCNN_cudnn_error.png)
# Could not create cudnn handle: CUDNN_STATUS_INTERNAL_ERROR
Read more »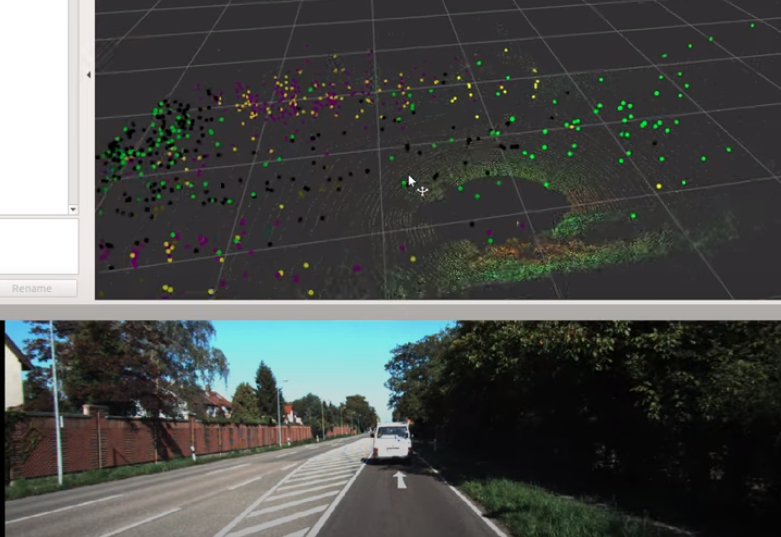
## Objectives - Compile and run demo of Limo ## Introduction - Limo: Lidar-Monocular Visual Odometry - My forked repo: ```sh git clo...
Read more »![U-net: replication using Pytorch [复现U-Net竟然如此简单]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/Unet_architecture.png)
## Objective - Implement U-net use Pytorch ## Paper Ronneberger, O., Fischer, P., & Brox, T. (2015). U-net: Convolutional networks f...
Read more »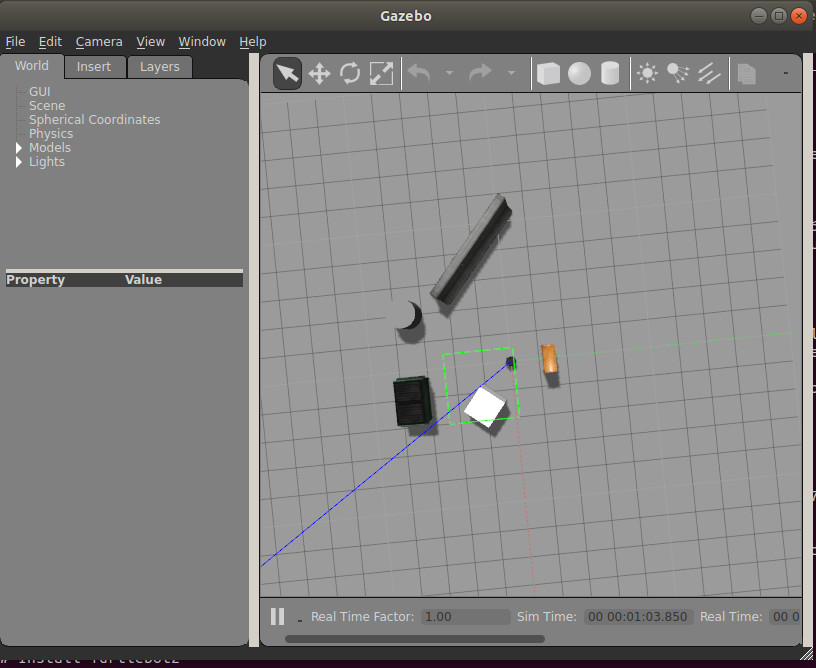
Turtlebot: Turtlebot development environment 开发环境搭建 # Objectives: - Install Turtlebot2 on Ubuntu 16.04 (ROS Kinetic) - Install Turtleb...
Read more »


