
ORB SLAM2 实践 (三)发布TF (相机轨迹与坐标变换)
## 目标 实现实时发布SLAM 的TF 使用TUM Dataset 来测试 使用Realsense Camera 进行测试 查看Realsense 相机的TF 通过调节Realsense相机参数,让其发布自身的TF
Read more »
## 目标 实现实时发布SLAM 的TF 使用TUM Dataset 来测试 使用Realsense Camera 进行测试 查看Realsense 相机的TF 通过调节Realsense相机参数,让其发布自身的TF
Read more »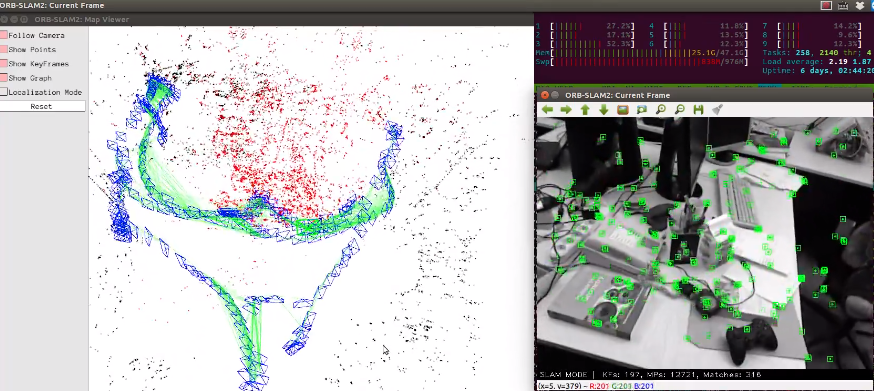
## 目标 - 本地安装 - ROS 版本的安装 # 准备工作 下载代码并阅读Readme ```sh git clone https://github.com/yubaoliu/ORB_SLAM2.git ``` ## 本地安装 - 安装 Pangolin -...
Read more »
# 目标 使用Realsense 相机来运行ORB SLAM2 # 创建Realsense 相机launch file - 安装 realsense2_camera ROS 包 ```sh sudo apt install ros-melodic-realsense2...
Read more »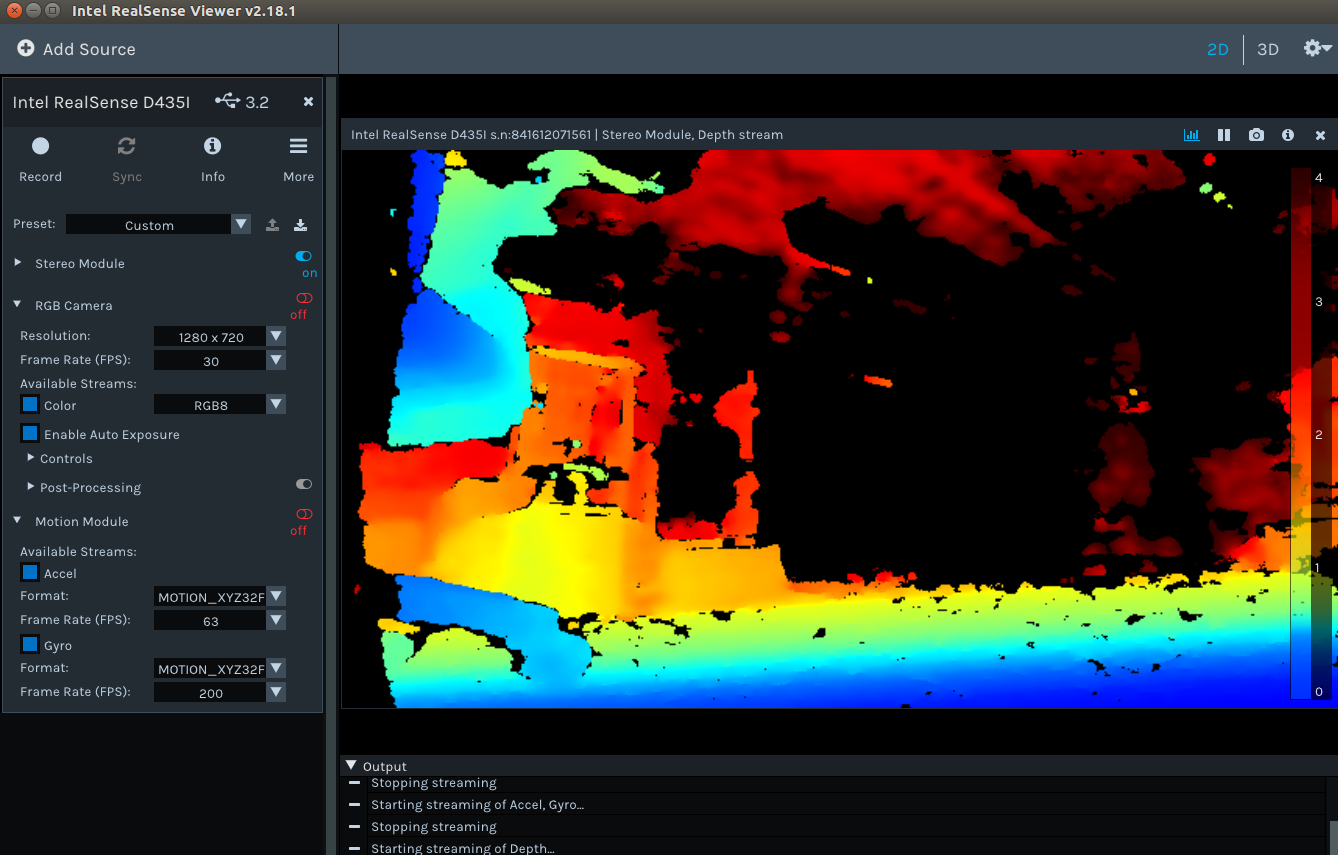
## Objective - Install Realsense SDK on Ubuntu 如何在Ubuntu中配置安装Realsense SDK ## Related Resources - [Get started](https://realsense.int...
Read more »![SLAM++: Simultaneous Localisation and Mapping at the Level of Objecs [Reading Seminar]](https://i.ytimg.com/vi/tmrAh1CqCRo/hqdefault.jpg)
## 论文介绍 论文标题: SLAM++: Simultaneous Localisation and Mapping at the Level of Objecs 对象级别SLAM(SLAM++)
Read more »


