
 # 准备工作
下载代码并阅读Readme
```sh
git clone https://github.com/yubaoliu/ORB_SLAM2.git
```
## 本地安装
- 安装 Pangolin
- 一键编译
```sh
build.sh
```
## ROS 版本的安装
```sh
build_ros.sh
```
ROS版本的默认是ros build而不是用catkin_make 来编译的。
# 更改与遗留
- [x] .cc 文件 改为.cpp
- [x] 加入launch file, param,data等
- [ ] 将ROS版本的改为catkin_make工程
# 准备工作
下载代码并阅读Readme
```sh
git clone https://github.com/yubaoliu/ORB_SLAM2.git
```
## 本地安装
- 安装 Pangolin
- 一键编译
```sh
build.sh
```
## ROS 版本的安装
```sh
build_ros.sh
```
ROS版本的默认是ros build而不是用catkin_make 来编译的。
# 更改与遗留
- [x] .cc 文件 改为.cpp
- [x] 加入launch file, param,data等
- [ ] 将ROS版本的改为catkin_make工程
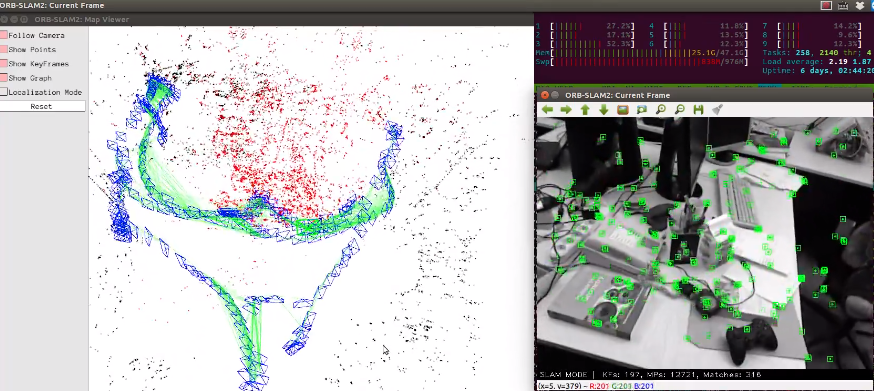
ORB SLAM2 实践 (一 )安装与运行
## 目标
- 本地安装
- ROS 版本的安装
# 准备工作
下载代码并阅读Readme
```sh
git clone https://github.com/yubaoliu/ORB_SLAM2.git
```
## 本地安装
- 安装 Pangolin
- 一键编译
```sh
build.sh
```
## ROS 版本的安装
```sh
build_ros.sh
```
ROS版本的默认是ros build而不是用catkin_make 来编译的。
# 更改与遗留
- [x] .cc 文件 改为.cpp
- [x] 加入launch file, param,data等
- [ ] 将ROS版本的改为catkin_make工程
# 准备工作
下载代码并阅读Readme
```sh
git clone https://github.com/yubaoliu/ORB_SLAM2.git
```
## 本地安装
- 安装 Pangolin
- 一键编译
```sh
build.sh
```
## ROS 版本的安装
```sh
build_ros.sh
```
ROS版本的默认是ros build而不是用catkin_make 来编译的。
# 更改与遗留
- [x] .cc 文件 改为.cpp
- [x] 加入launch file, param,data等
- [ ] 将ROS版本的改为catkin_make工程




No comments