
 - `./SimpleViewer`
- ./NiViewer

# ROS Wrapper
- Install
```sh
sudo apt-get install ros-kinetic-realsense2-camera
```
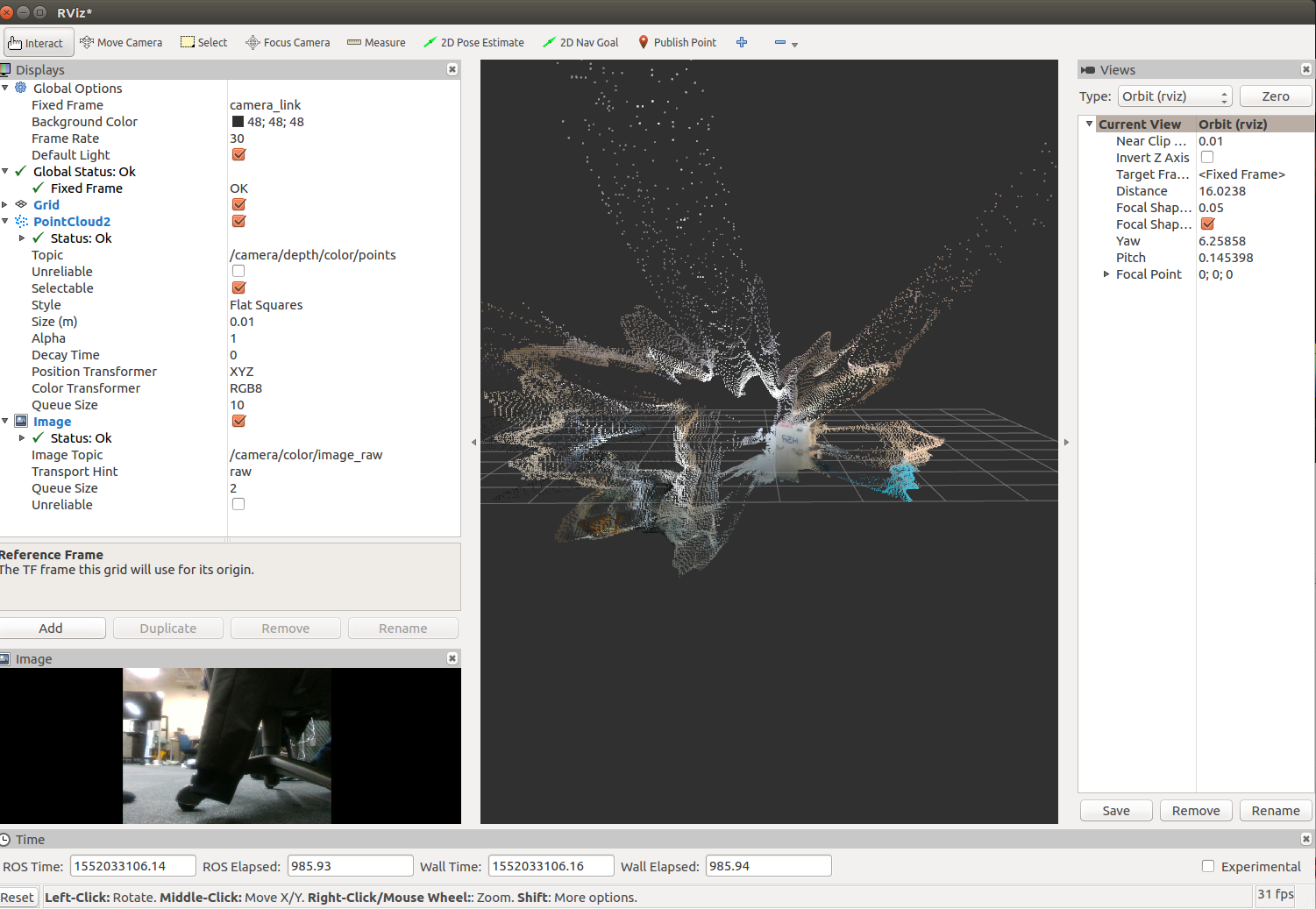
- ROS: RGBD Poind Cloud
```sh
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
```
- ROS: Start the camera node
```sh
roslaunch realsense2_camera rs_camera.launch
```
# sugestion
Important notes: - Don't use the pre-build packages, try to build
with source code. I don't know why - Make sure the SDK's version is
compatible with ROS Wrapper's version
- Error when execute ./scripts/patch-realsense-ubuntu-lts.sh
Error Description:
```sh
make: Leaving directory '/home/yubao/GitProject/librealsense-2.19.0/ubuntu-xenial-hwe'
Patched kernels modules were created successfully
Replacing videodev :
Module videodev is used by videobuf2_core
Unloading dependency videobuf2_core
modprobe: FATAL: Module videobuf2_core is in use.
Failed to unload module videobuf2_core. error type 1 . Operation is aborted
yubao@yubao-Z370M-S01:~/GitProject/librealsense-2.19.0$
```
Solution:
```sh
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
videobuf2_core 40960 2 videobuf2_v4l2,uvcvideo
videodev 180224 3 videobuf2_core,videobuf2_v4l2,uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ sudo modprobe -r uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
```
- `./SimpleViewer`

- ./NiViewer

# ROS Wrapper
- Install
```sh
sudo apt-get install ros-kinetic-realsense2-camera
```
- ROS: RGBD Poind Cloud
```sh
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
```
- ROS: Start the camera node
```sh
roslaunch realsense2_camera rs_camera.launch
```

# sugestion
Important notes: - Don't use the pre-build packages, try to build
with source code. I don't know why - Make sure the SDK's version is
compatible with ROS Wrapper's version
- Error when execute ./scripts/patch-realsense-ubuntu-lts.sh
Error Description:
```sh
make: Leaving directory '/home/yubao/GitProject/librealsense-2.19.0/ubuntu-xenial-hwe'
Patched kernels modules were created successfully
Replacing videodev :
Module videodev is used by videobuf2_core
Unloading dependency videobuf2_core
modprobe: FATAL: Module videobuf2_core is in use.
Failed to unload module videobuf2_core. error type 1 . Operation is aborted
yubao@yubao-Z370M-S01:~/GitProject/librealsense-2.19.0$
```
Solution:
```sh
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
videobuf2_core 40960 2 videobuf2_v4l2,uvcvideo
videodev 180224 3 videobuf2_core,videobuf2_v4l2,uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ sudo modprobe -r uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
```
Realsense Camera on Ubuntu (如何配置安装Realsense相机)
## Objective
- Install Realsense SDK on Ubuntu
如何在Ubuntu中配置安装Realsense SDK
## Related Resources
- [Get started](https://realsense.intel.com/get-started/)
- [IntelRealSense/librealsense-Github](https://github.com/IntelRealSense/librealsense)
- [Intel® RealSense™ SDK 2.0 Github User Guide](https://www.intel.com/content/dam/support/us/en/documents/emerging-technologies/intel-realsense-technology/Intel-RealSense-SDK2-Github-Guide.pdf)
- Intel® RealSense™ SDK 2.0 (build 2.19.0)
[Download](https://github.com/IntelRealSense/librealsense/releases/tag/v2.19.0)
- Intel® RealSense™ Depth Cameras D435i
- ROS Wrapper 2.0 for Intel® RealSense™ Devices (build 2.2.1)
[Download](https://github.com/intel-ros/realsense/releases)
- SLAM with D435i: [wiki](https://github.com/intel-ros/realsense/wiki/SLAM-with-D435i)
# Preparation
- RealSense Camere: my device is D435i
- Ubuntu >= 16.04
```sh
Ubuntu 16.04/18.04 LTS (Linux Kernels 4.4, 4.8 ,4.10, 4.13, 4.15 and 4.16)
```
Refer [Linux Ubuntu Installation](https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md)
# Building librealsense2 SDK Frome Source Code
## Build librealsenseSDK on Ubuntu 18
```sh
sudo apt-get update && sudo apt-get upgrade
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense
./scripts/setup_udev_rules.sh
./scripts/patch-realsense-ubuntu-lts.sh
```
## Build libreasenseSDK on Ubuntu 16
```sh
sudo apt-get update && sudo apt-get upgrade
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install libglfw3-dev
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense
./scripts/setup_udev_rules.sh
./scripts/patch-realsense-ubuntu-lts.sh
```
- Build and install
```sh
mkdir build && cd build
cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true
make -j3
make install or sudo make install
```
# Install librealsense use pre-build package
Refer https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
- Register the server's public key
```sh
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
```
- Add the server to the list of repositories
Ubuntu 16:
```sh
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
```
Ubuntu 18:
```sh
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
```
- Install the libraries
```sh
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
```
- Optionally install the developer and debug packages:
```sh
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
```
## Recompile and install librealsense binaries
`sudo make uninstall && make clean && make && sudo make install`
## Remove all RealSense™ SDK-related packages with:
`dpkg -l | grep "realsense" | cut -d " " -f 3 | xargs sudo dpkg --purge`
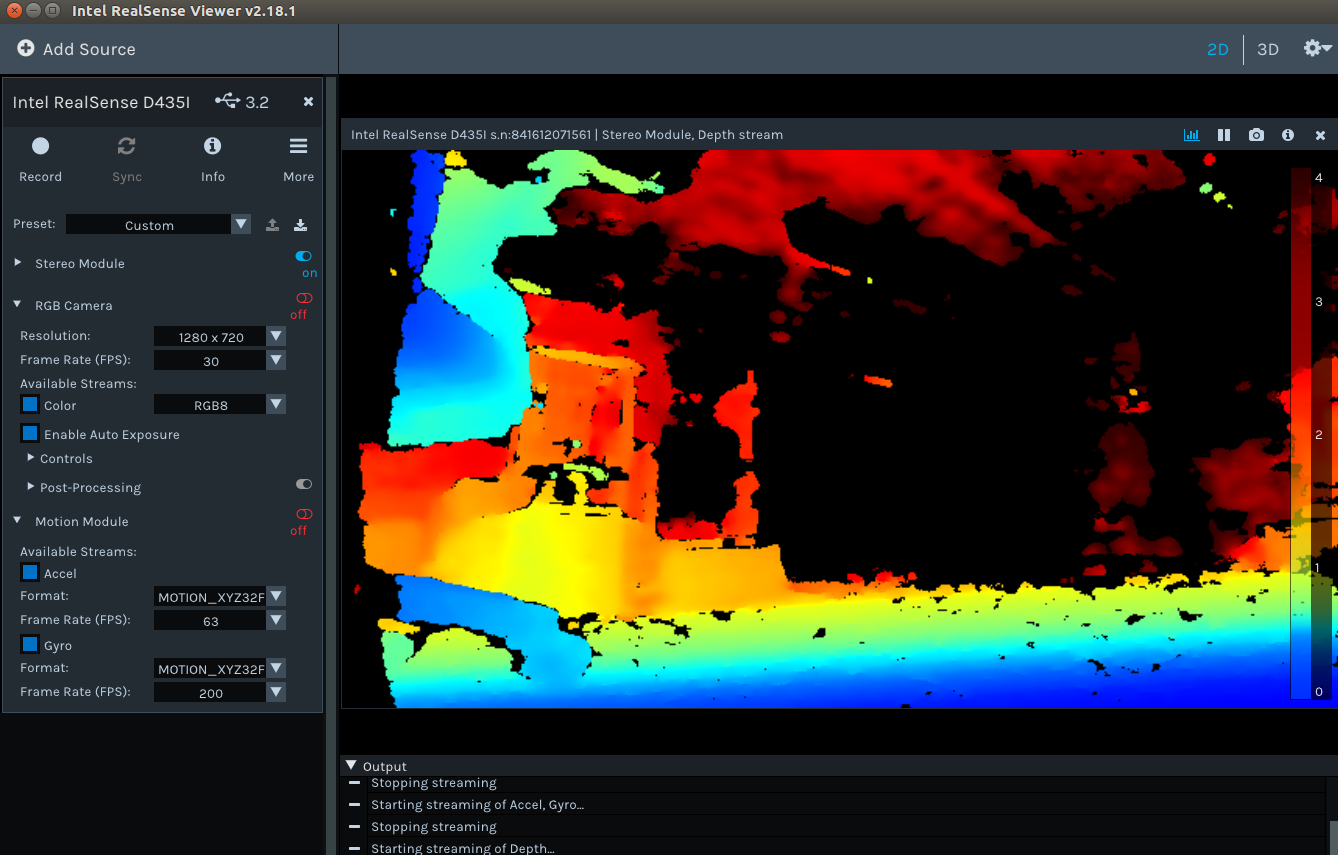
## realsense-viewer
Reconnect the Intel RealSense depth camera and run:
## Tools
- **realsense-viewer**
To verify the installation.
If not working, reboot your PC and try again.
- `./SimpleViewer`

- ./NiViewer

# ROS Wrapper
- Install
```sh
sudo apt-get install ros-kinetic-realsense2-camera
```
- ROS: RGBD Poind Cloud
```sh
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
```
- ROS: Start the camera node
```sh
roslaunch realsense2_camera rs_camera.launch
```

# sugestion
Important notes: - Don't use the pre-build packages, try to build
with source code. I don't know why - Make sure the SDK's version is
compatible with ROS Wrapper's version
- Error when execute ./scripts/patch-realsense-ubuntu-lts.sh
Error Description:
```sh
make: Leaving directory '/home/yubao/GitProject/librealsense-2.19.0/ubuntu-xenial-hwe'
Patched kernels modules were created successfully
Replacing videodev :
Module videodev is used by videobuf2_core
Unloading dependency videobuf2_core
modprobe: FATAL: Module videobuf2_core is in use.
Failed to unload module videobuf2_core. error type 1 . Operation is aborted
yubao@yubao-Z370M-S01:~/GitProject/librealsense-2.19.0$
```
Solution:
```sh
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
videobuf2_core 40960 2 videobuf2_v4l2,uvcvideo
videodev 180224 3 videobuf2_core,videobuf2_v4l2,uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ sudo modprobe -r uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
```
- `./SimpleViewer`

- ./NiViewer

# ROS Wrapper
- Install
```sh
sudo apt-get install ros-kinetic-realsense2-camera
```
- ROS: RGBD Poind Cloud
```sh
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
```
- ROS: Start the camera node
```sh
roslaunch realsense2_camera rs_camera.launch
```

# sugestion
Important notes: - Don't use the pre-build packages, try to build
with source code. I don't know why - Make sure the SDK's version is
compatible with ROS Wrapper's version
- Error when execute ./scripts/patch-realsense-ubuntu-lts.sh
Error Description:
```sh
make: Leaving directory '/home/yubao/GitProject/librealsense-2.19.0/ubuntu-xenial-hwe'
Patched kernels modules were created successfully
Replacing videodev :
Module videodev is used by videobuf2_core
Unloading dependency videobuf2_core
modprobe: FATAL: Module videobuf2_core is in use.
Failed to unload module videobuf2_core. error type 1 . Operation is aborted
yubao@yubao-Z370M-S01:~/GitProject/librealsense-2.19.0$
```
Solution:
```sh
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
videobuf2_core 40960 2 videobuf2_v4l2,uvcvideo
videodev 180224 3 videobuf2_core,videobuf2_v4l2,uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ sudo modprobe -r uvcvideo
yubao@yubao-Z370M-S01:~/catkin_ws$ lsmod | grep videobuf2_core
```




No comments