
 ## Introduction
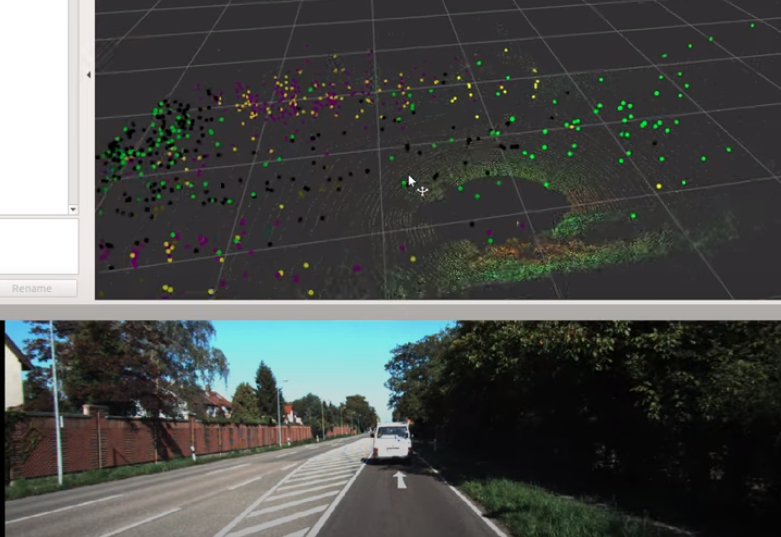
- Limo: Lidar-Monocular Visual Odometry
- My forked repo:
```sh
git clone --recursive https://github.com/yubaoliu/limo.git
```
## Build manually
Refer steps in dockerfile: https://github.com/johannes-graeter/limo/blob/master/docker/src/Dockerfile
## Use Docker
- Build
```sh
cd limo/docker
docker-compose build
```
- Start docker
```sh
docker-compose up
docker-compose exec limo bash
```
## Run demo
```sh
roslaunch demo_keyframe_bundle_adjustment_meta kitti_standalone.launch
rosbag play 04.bag -r 0.1 --pause --clock
rviz -d ${your_catkin_workspace}/src/demo_keyframe_bundle_adjustment_meta/res/default.rviz
```
## 安装与运行
Demo: https://www.youtube.com/embed/ZFmG08TE6bw
## Possible Errors
### Eigen related
when run:
```sh
docker-compose build
```
see:
```sh
[build] Note: Workspace packages have changed, please re-source setup files to use them.
ERROR: Service 'limo' failed to build: The command '/bin/sh -c /bin/bash -c 'source /opt/ros/melodic/setup.bash && catkin build'' returned a non-zero code: 1
```
```sh
/workspace/limo_ws/src/limo/robust_optimization/src/robust_solving.cpp:9:10: fatal error: Eigen/Dense: No such file or directory
#include
## Introduction
- Limo: Lidar-Monocular Visual Odometry
- My forked repo:
```sh
git clone --recursive https://github.com/yubaoliu/limo.git
```
## Build manually
Refer steps in dockerfile: https://github.com/johannes-graeter/limo/blob/master/docker/src/Dockerfile
## Use Docker
- Build
```sh
cd limo/docker
docker-compose build
```
- Start docker
```sh
docker-compose up
docker-compose exec limo bash
```
## Run demo
```sh
roslaunch demo_keyframe_bundle_adjustment_meta kitti_standalone.launch
rosbag play 04.bag -r 0.1 --pause --clock
rviz -d ${your_catkin_workspace}/src/demo_keyframe_bundle_adjustment_meta/res/default.rviz
```
## 安装与运行
Demo: https://www.youtube.com/embed/ZFmG08TE6bw
## Possible Errors
### Eigen related
when run:
```sh
docker-compose build
```
see:
```sh
[build] Note: Workspace packages have changed, please re-source setup files to use them.
ERROR: Service 'limo' failed to build: The command '/bin/sh -c /bin/bash -c 'source /opt/ros/melodic/setup.bash && catkin build'' returned a non-zero code: 1
```
```sh
/workspace/limo_ws/src/limo/robust_optimization/src/robust_solving.cpp:9:10: fatal error: Eigen/Dense: No such file or directory
#include Limo: Lidar-Monocular Visual Odometry 安装与运行
## Objectives
- Compile and run demo of Limo
## Introduction
- Limo: Lidar-Monocular Visual Odometry
- My forked repo:
```sh
git clone --recursive https://github.com/yubaoliu/limo.git
```
## Build manually
Refer steps in dockerfile: https://github.com/johannes-graeter/limo/blob/master/docker/src/Dockerfile
## Use Docker
- Build
```sh
cd limo/docker
docker-compose build
```
- Start docker
```sh
docker-compose up
docker-compose exec limo bash
```
## Run demo
```sh
roslaunch demo_keyframe_bundle_adjustment_meta kitti_standalone.launch
rosbag play 04.bag -r 0.1 --pause --clock
rviz -d ${your_catkin_workspace}/src/demo_keyframe_bundle_adjustment_meta/res/default.rviz
```
## 安装与运行
Demo: https://www.youtube.com/embed/ZFmG08TE6bw
## Possible Errors
### Eigen related
when run:
```sh
docker-compose build
```
see:
```sh
[build] Note: Workspace packages have changed, please re-source setup files to use them.
ERROR: Service 'limo' failed to build: The command '/bin/sh -c /bin/bash -c 'source /opt/ros/melodic/setup.bash && catkin build'' returned a non-zero code: 1
```
```sh
/workspace/limo_ws/src/limo/robust_optimization/src/robust_solving.cpp:9:10: fatal error: Eigen/Dense: No such file or directory
#include
^~~~~~~~~~~~~
compilation terminated.
```
Solution:
The path of eigen is:
```sh
/usr/include/eigen3
```
### ython-tk
Error:
```sh
ImportError: No module named _tkinter, please install the python-tk package
```
Solution:
```sh
apt install python-tk
```
## Introduction
- Limo: Lidar-Monocular Visual Odometry
- My forked repo:
```sh
git clone --recursive https://github.com/yubaoliu/limo.git
```
## Build manually
Refer steps in dockerfile: https://github.com/johannes-graeter/limo/blob/master/docker/src/Dockerfile
## Use Docker
- Build
```sh
cd limo/docker
docker-compose build
```
- Start docker
```sh
docker-compose up
docker-compose exec limo bash
```
## Run demo
```sh
roslaunch demo_keyframe_bundle_adjustment_meta kitti_standalone.launch
rosbag play 04.bag -r 0.1 --pause --clock
rviz -d ${your_catkin_workspace}/src/demo_keyframe_bundle_adjustment_meta/res/default.rviz
```
## 安装与运行
Demo: https://www.youtube.com/embed/ZFmG08TE6bw
## Possible Errors
### Eigen related
when run:
```sh
docker-compose build
```
see:
```sh
[build] Note: Workspace packages have changed, please re-source setup files to use them.
ERROR: Service 'limo' failed to build: The command '/bin/sh -c /bin/bash -c 'source /opt/ros/melodic/setup.bash && catkin build'' returned a non-zero code: 1
```
```sh
/workspace/limo_ws/src/limo/robust_optimization/src/robust_solving.cpp:9:10: fatal error: Eigen/Dense: No such file or directory
#include 



No comments