
# Demo
# Tutorials (in Chinese Language)
- [语义建图学习(1-4)floatlazer-semantic-slam项目工程简介及代码分析](https://www.bilibili.com/video/BV1WU4y1s7Rx/)
# Compile
## Get source code
- clone project into ROS workspace, e.g. catkin_ws/src
## compile ORB_SLAM2
```sh
cd semantic_slam_floatlazer
cd ORB_SLAM2
../build.sh
```
## Comple ROS wrapper
```sh
catkin_make
```
## Install Python dependencies
```sh
setuptools>=41.0.0
numpy>=1.15
scipy
Pillow
cython
opencv-python==3.3.1.11
matplotlib
scikit-image
tensorflow-gpu==1.13.1
keras==2.0.8
h5py
imageio==2.6.1
imgaug
pandas
future
torch
torchvision
protobuf
IPython[all]
```
Note:
- you can remove keras related packages
- Install them using "pip install -r [FILE_NAME].txt"
# How to run
- Modify parames
```sh
cd /semantic_slam_floatlazer/semantic_slam/params
vim semantic_cloud.yaml
```
You have to set model_path. E.g.
```sh
model_path: "/home/.../Dataset/semantic_slam/pspnet_50_ade20k.pth"
```
- Get CNN models
- [Model trained on ade20k dataset](https://drive.google.com/file/d/1u_BEWdVIYiDnpVmAxwME1z3rnWWkjxm5/view?usp=sharing)
- [Model fine tuned on SUNRGBD dataset](https://drive.google.com/file/d/1t26t2VHNOzmjH-0lDTdYzXBACOV_4-eL/view?usp=sharing)
- Run launch file
```sh
roslaunch floatlazer_semantic_slam semantic_mapping.launch
```
For TUM dataset (TUM bagfile), run
```sh
roslaunch floatlazer_semantic_slam semantic_mapping_tum.launch
```
- Run bag file
For example:
```sh
rosbag play --clock demo.bag
```
[download demo.bag](https://drive.google.com/file/d/1j12c_Fruu-ylO1FHYC4sbmlG9IutYJQg/view?usp=sharing)
# Possible Errors
## ColorOccupancyGrid
Issue:
```sh
[ERROR] [1595235776.415659314]: PluginlibFactory: The plugin for class 'octomap_rviz_plugin/ColorOccupancyGrid' failed to load. Error: According to the loaded plugin descriptions the class octomap_rviz_plugin/ColorOccupancyGrid with base class type rviz::Display does not exist. Declared types are rviz/Axes rviz/Camera rviz/DepthCloud rviz/Effort rviz/FluidPressure rviz/Grid rviz/GridCells rviz/Illuminance rviz/Image rviz/InteractiveMarkers rviz/LaserScan rviz/Map rviz/Marker rviz/MarkerArray rviz/Odometry rviz/Path rviz/PointCloud rviz/PointCloud2 rviz/PointStamped rviz/Polygon rviz/Pose rviz/PoseArray rviz/PoseWithCovariance rviz/Range rviz/RelativeHumidity rviz/RobotModel rviz/TF rviz/Temperature rviz/WrenchStamped rviz_plugin_tutorials/Imu
```
Solution:
```sh
sudo apt install ros-kinetic-octomap-rviz-plugins
```

# Demo
# Tutorials (in Chinese Language)
- [语义建图学习(1-4)floatlazer-semantic-slam项目工程简介及代码分析](https://www.bilibili.com/video/BV1WU4y1s7Rx/)
# Compile
## Get source code
- clone project into ROS workspace, e.g. catkin_ws/src
## compile ORB_SLAM2
```sh
cd semantic_slam_floatlazer
cd ORB_SLAM2
../build.sh
```
## Comple ROS wrapper
```sh
catkin_make
```
## Install Python dependencies
```sh
setuptools>=41.0.0
numpy>=1.15
scipy
Pillow
cython
opencv-python==3.3.1.11
matplotlib
scikit-image
tensorflow-gpu==1.13.1
keras==2.0.8
h5py
imageio==2.6.1
imgaug
pandas
future
torch
torchvision
protobuf
IPython[all]
```
Note:
- you can remove keras related packages
- Install them using "pip install -r [FILE_NAME].txt"
# How to run
- Modify parames
```sh
cd /semantic_slam_floatlazer/semantic_slam/params
vim semantic_cloud.yaml
```
You have to set model_path. E.g.
```sh
model_path: "/home/.../Dataset/semantic_slam/pspnet_50_ade20k.pth"
```
- Get CNN models
- [Model trained on ade20k dataset](https://drive.google.com/file/d/1u_BEWdVIYiDnpVmAxwME1z3rnWWkjxm5/view?usp=sharing)
- [Model fine tuned on SUNRGBD dataset](https://drive.google.com/file/d/1t26t2VHNOzmjH-0lDTdYzXBACOV_4-eL/view?usp=sharing)
- Run launch file
```sh
roslaunch floatlazer_semantic_slam semantic_mapping.launch
```
For TUM dataset (TUM bagfile), run
```sh
roslaunch floatlazer_semantic_slam semantic_mapping_tum.launch
```
- Run bag file
For example:
```sh
rosbag play --clock demo.bag
```
[download demo.bag](https://drive.google.com/file/d/1j12c_Fruu-ylO1FHYC4sbmlG9IutYJQg/view?usp=sharing)
# Possible Errors
## ColorOccupancyGrid
Issue:
```sh
[ERROR] [1595235776.415659314]: PluginlibFactory: The plugin for class 'octomap_rviz_plugin/ColorOccupancyGrid' failed to load. Error: According to the loaded plugin descriptions the class octomap_rviz_plugin/ColorOccupancyGrid with base class type rviz::Display does not exist. Declared types are rviz/Axes rviz/Camera rviz/DepthCloud rviz/Effort rviz/FluidPressure rviz/Grid rviz/GridCells rviz/Illuminance rviz/Image rviz/InteractiveMarkers rviz/LaserScan rviz/Map rviz/Marker rviz/MarkerArray rviz/Odometry rviz/Path rviz/PointCloud rviz/PointCloud2 rviz/PointStamped rviz/Polygon rviz/Pose rviz/PoseArray rviz/PoseWithCovariance rviz/Range rviz/RelativeHumidity rviz/RobotModel rviz/TF rviz/Temperature rviz/WrenchStamped rviz_plugin_tutorials/Imu
```
Solution:
```sh
sudo apt install ros-kinetic-octomap-rviz-plugins
```
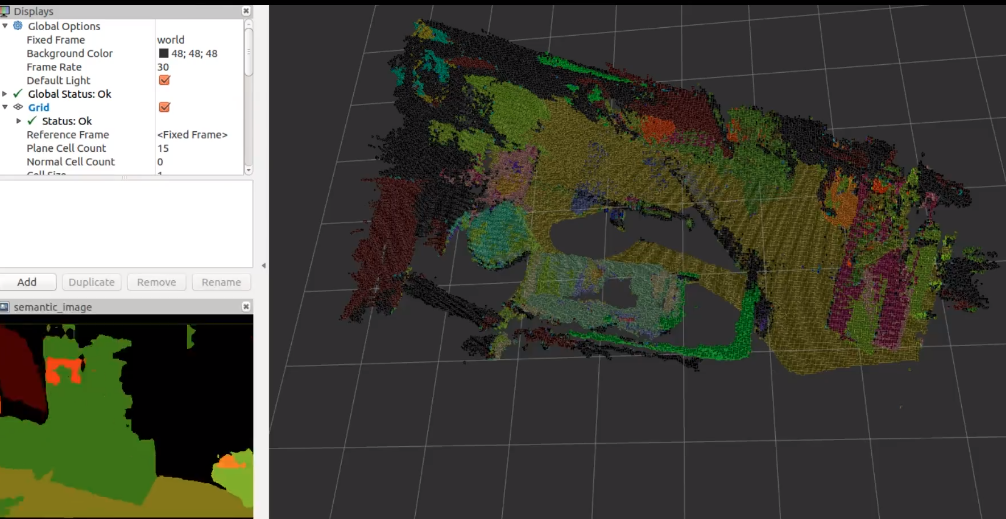
Real-time voxel based 3D semantic mapping with a hand held RGB-D camera [SLAM Project]
# Project
- [Real-time voxel based 3D semantic mapping with a hand held RGB-D camera](https://drive.google.com/file/d/1Uk5YLMyoyMGMkE8FtJCNrZp_brGh5z3M/view)
# Source Code
- Official github: [floatlazer/semantic_slam](https://github.com/floatlazer/semantic_slam)
- My customized version: [yubaoliu/semantic_slam_floatlazer](https://github.com/yubaoliu/semantic_slam_floatlazer)

# Demo
# Tutorials (in Chinese Language)
- [语义建图学习(1-4)floatlazer-semantic-slam项目工程简介及代码分析](https://www.bilibili.com/video/BV1WU4y1s7Rx/)
# Compile
## Get source code
- clone project into ROS workspace, e.g. catkin_ws/src
## compile ORB_SLAM2
```sh
cd semantic_slam_floatlazer
cd ORB_SLAM2
../build.sh
```
## Comple ROS wrapper
```sh
catkin_make
```
## Install Python dependencies
```sh
setuptools>=41.0.0
numpy>=1.15
scipy
Pillow
cython
opencv-python==3.3.1.11
matplotlib
scikit-image
tensorflow-gpu==1.13.1
keras==2.0.8
h5py
imageio==2.6.1
imgaug
pandas
future
torch
torchvision
protobuf
IPython[all]
```
Note:
- you can remove keras related packages
- Install them using "pip install -r [FILE_NAME].txt"
# How to run
- Modify parames
```sh
cd /semantic_slam_floatlazer/semantic_slam/params
vim semantic_cloud.yaml
```
You have to set model_path. E.g.
```sh
model_path: "/home/.../Dataset/semantic_slam/pspnet_50_ade20k.pth"
```
- Get CNN models
- [Model trained on ade20k dataset](https://drive.google.com/file/d/1u_BEWdVIYiDnpVmAxwME1z3rnWWkjxm5/view?usp=sharing)
- [Model fine tuned on SUNRGBD dataset](https://drive.google.com/file/d/1t26t2VHNOzmjH-0lDTdYzXBACOV_4-eL/view?usp=sharing)
- Run launch file
```sh
roslaunch floatlazer_semantic_slam semantic_mapping.launch
```
For TUM dataset (TUM bagfile), run
```sh
roslaunch floatlazer_semantic_slam semantic_mapping_tum.launch
```
- Run bag file
For example:
```sh
rosbag play --clock demo.bag
```
[download demo.bag](https://drive.google.com/file/d/1j12c_Fruu-ylO1FHYC4sbmlG9IutYJQg/view?usp=sharing)
# Possible Errors
## ColorOccupancyGrid
Issue:
```sh
[ERROR] [1595235776.415659314]: PluginlibFactory: The plugin for class 'octomap_rviz_plugin/ColorOccupancyGrid' failed to load. Error: According to the loaded plugin descriptions the class octomap_rviz_plugin/ColorOccupancyGrid with base class type rviz::Display does not exist. Declared types are rviz/Axes rviz/Camera rviz/DepthCloud rviz/Effort rviz/FluidPressure rviz/Grid rviz/GridCells rviz/Illuminance rviz/Image rviz/InteractiveMarkers rviz/LaserScan rviz/Map rviz/Marker rviz/MarkerArray rviz/Odometry rviz/Path rviz/PointCloud rviz/PointCloud2 rviz/PointStamped rviz/Polygon rviz/Pose rviz/PoseArray rviz/PoseWithCovariance rviz/Range rviz/RelativeHumidity rviz/RobotModel rviz/TF rviz/Temperature rviz/WrenchStamped rviz_plugin_tutorials/Imu
```
Solution:
```sh
sudo apt install ros-kinetic-octomap-rviz-plugins
```

# Demo
# Tutorials (in Chinese Language)
- [语义建图学习(1-4)floatlazer-semantic-slam项目工程简介及代码分析](https://www.bilibili.com/video/BV1WU4y1s7Rx/)
# Compile
## Get source code
- clone project into ROS workspace, e.g. catkin_ws/src
## compile ORB_SLAM2
```sh
cd semantic_slam_floatlazer
cd ORB_SLAM2
../build.sh
```
## Comple ROS wrapper
```sh
catkin_make
```
## Install Python dependencies
```sh
setuptools>=41.0.0
numpy>=1.15
scipy
Pillow
cython
opencv-python==3.3.1.11
matplotlib
scikit-image
tensorflow-gpu==1.13.1
keras==2.0.8
h5py
imageio==2.6.1
imgaug
pandas
future
torch
torchvision
protobuf
IPython[all]
```
Note:
- you can remove keras related packages
- Install them using "pip install -r [FILE_NAME].txt"
# How to run
- Modify parames
```sh
cd /semantic_slam_floatlazer/semantic_slam/params
vim semantic_cloud.yaml
```
You have to set model_path. E.g.
```sh
model_path: "/home/.../Dataset/semantic_slam/pspnet_50_ade20k.pth"
```
- Get CNN models
- [Model trained on ade20k dataset](https://drive.google.com/file/d/1u_BEWdVIYiDnpVmAxwME1z3rnWWkjxm5/view?usp=sharing)
- [Model fine tuned on SUNRGBD dataset](https://drive.google.com/file/d/1t26t2VHNOzmjH-0lDTdYzXBACOV_4-eL/view?usp=sharing)
- Run launch file
```sh
roslaunch floatlazer_semantic_slam semantic_mapping.launch
```
For TUM dataset (TUM bagfile), run
```sh
roslaunch floatlazer_semantic_slam semantic_mapping_tum.launch
```
- Run bag file
For example:
```sh
rosbag play --clock demo.bag
```
[download demo.bag](https://drive.google.com/file/d/1j12c_Fruu-ylO1FHYC4sbmlG9IutYJQg/view?usp=sharing)
# Possible Errors
## ColorOccupancyGrid
Issue:
```sh
[ERROR] [1595235776.415659314]: PluginlibFactory: The plugin for class 'octomap_rviz_plugin/ColorOccupancyGrid' failed to load. Error: According to the loaded plugin descriptions the class octomap_rviz_plugin/ColorOccupancyGrid with base class type rviz::Display does not exist. Declared types are rviz/Axes rviz/Camera rviz/DepthCloud rviz/Effort rviz/FluidPressure rviz/Grid rviz/GridCells rviz/Illuminance rviz/Image rviz/InteractiveMarkers rviz/LaserScan rviz/Map rviz/Marker rviz/MarkerArray rviz/Odometry rviz/Path rviz/PointCloud rviz/PointCloud2 rviz/PointStamped rviz/Polygon rviz/Pose rviz/PoseArray rviz/PoseWithCovariance rviz/Range rviz/RelativeHumidity rviz/RobotModel rviz/TF rviz/Temperature rviz/WrenchStamped rviz_plugin_tutorials/Imu
```
Solution:
```sh
sudo apt install ros-kinetic-octomap-rviz-plugins
```




No comments