
### Improvement
$\xi = ( 1 - \frac{r}{u} )$
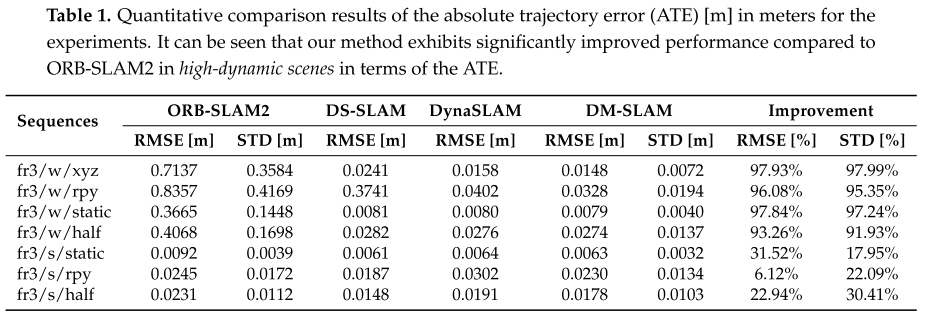
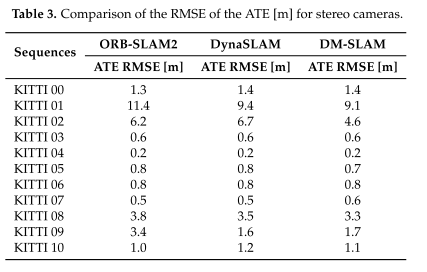
where $\xi$ denotes the improvement value, $r$ represents the RMSE value of DM-SLAM, and $u$ represents the RMSE value of ORB-SLAM2.
### Experiments
**RGBD**
**MONO**
**KITI**




### Improvement
$\xi = ( 1 - \frac{r}{u} )$
where $\xi$ denotes the improvement value, $r$ represents the RMSE value of DM-SLAM, and $u$ represents the RMSE value of ORB-SLAM2.
### Experiments
**RGBD**


**MONO**

**KITI**


DM-SLAM: A Feature-Based SLAM System for Rigid Dynamic Scenes [论文阅读]
[toc]
# 2020-DM-SLAM: A Feature-Based SLAM System for Rigid Dynamic Scenes
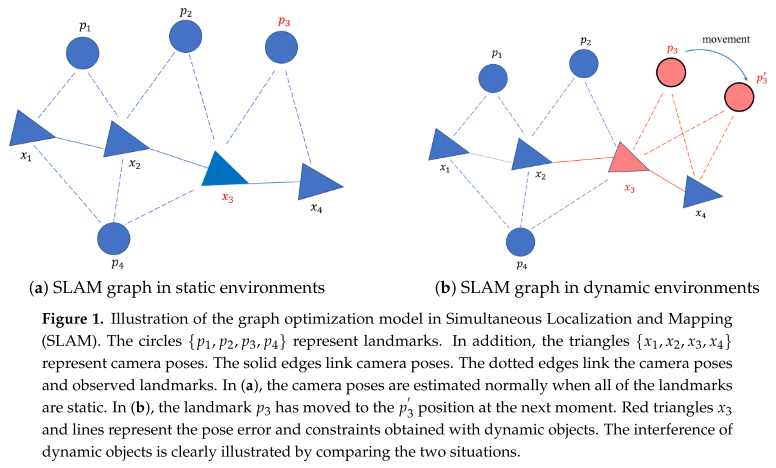
本文所解决的问题是视觉里程计中的 静态世界/物体假设
大体思想:
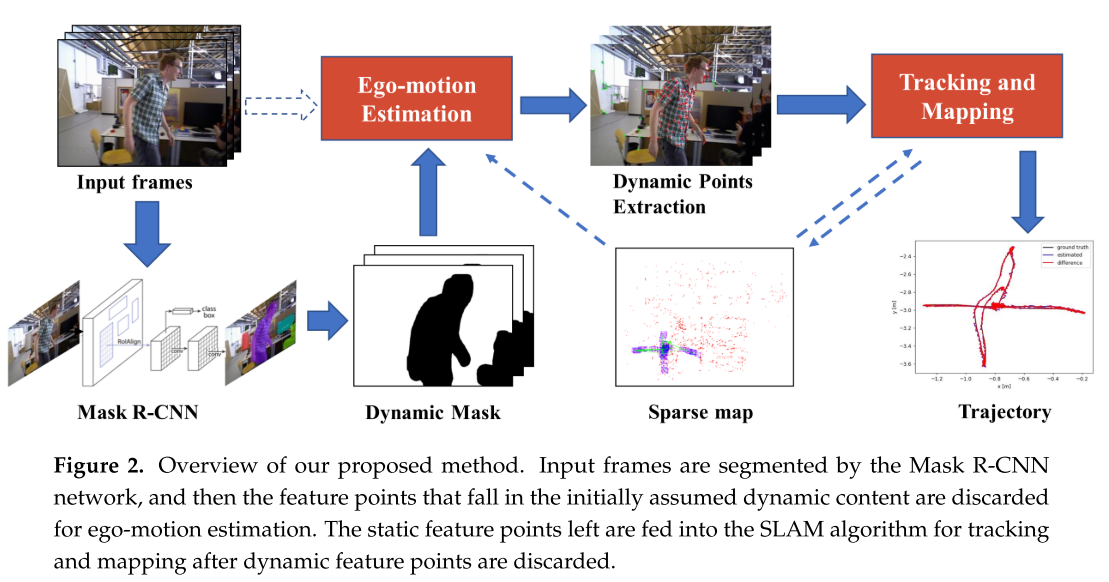
- MaskRCNN 对物体进行分割,得到可能的动态物体
- 支持单目/双目/RGBD 相机
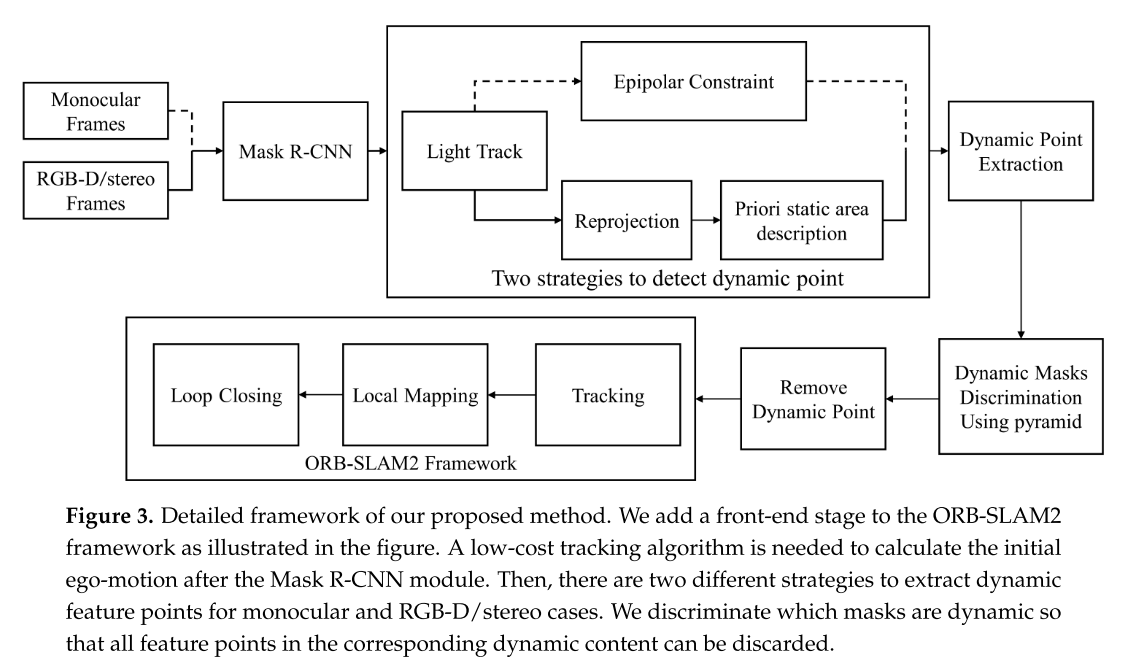
- 模仿DynaSLAM中的 light track,通过轻量级的Tracking来求得相机位姿,以用于动态点检测
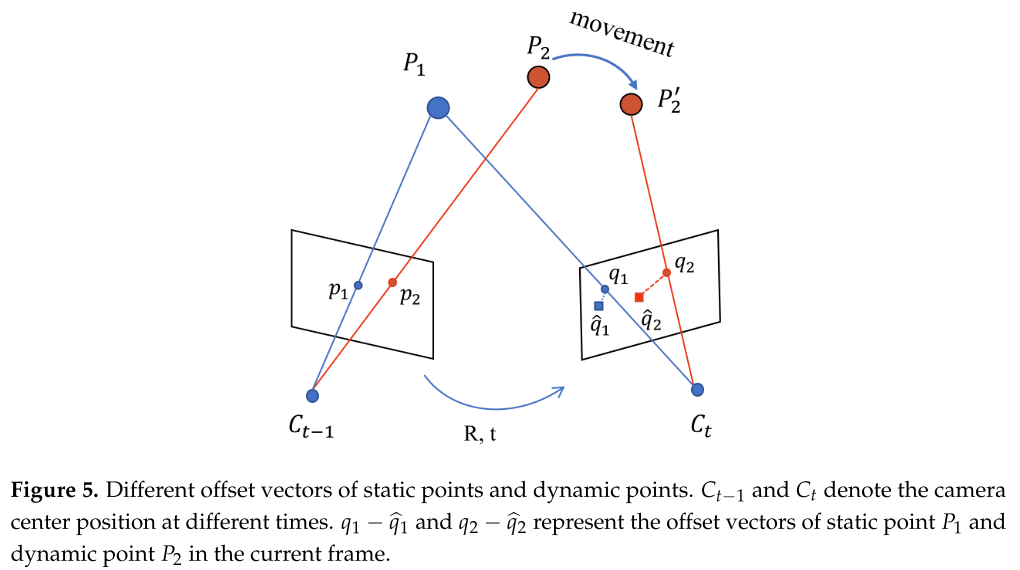
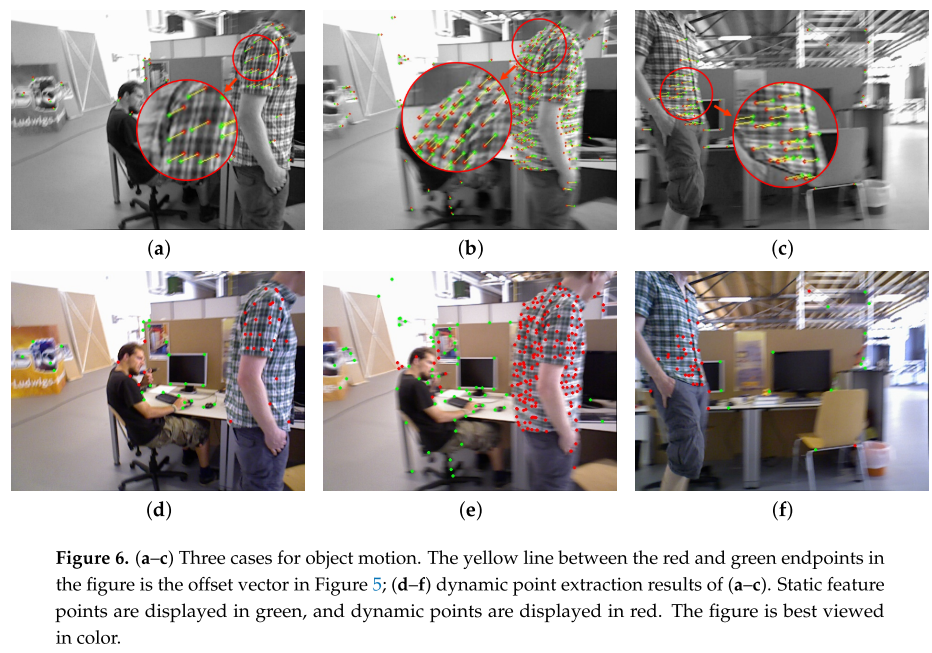
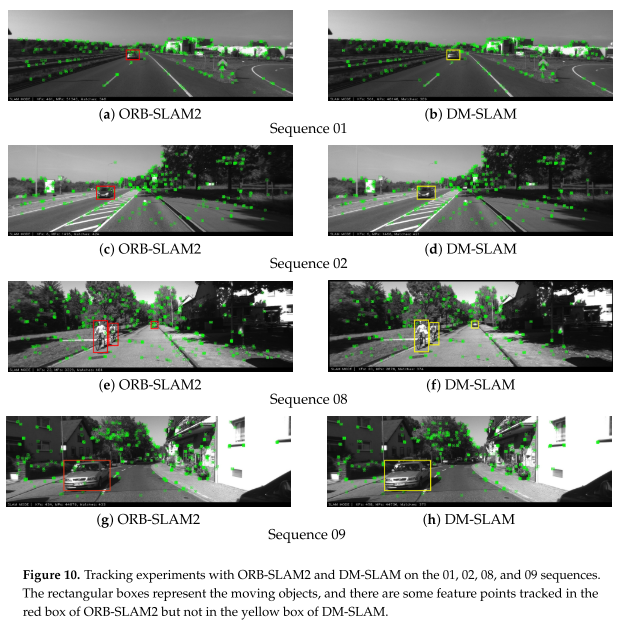
- 针对双目/RGBD 相机的场景,使用光流法得到匹配的特征点对。将参考帧中的特征点向当前帧进行投影,计算当前帧上观测值与投影点的差(向量)。通过这个差值找到那些与主流运动方向相违的特征点。统计这点动态点的数量,以确定mask中哪些区域是动态区域。
- 针对单目的场景,通过对极约束来找出动态点。其它与RGBD相似。
本文比较特别的地方:
如果可能的动态物体运动范围不大的话,本文视为是静态物体。例如停着的车,正在坐着的人。本文声称这样会解决可能的静态特征点不足的情况,特别是移除可能的动态物体身上的特征点的时候。DynaSLAM是直接去除了可能的动态物体(人)身上的所有特征点。
Cheng, J., Wang, Z., Zhou, H., Li, L., & Yao, J. (2020). DM-SLAM: A feature-based SLAM system for rigid dynamic scenes. *ISPRS International Journal of Geo-Information*, *9*(4), 1–18. https://doi.org/10.3390/ijgi9040202
### contributions
The contributions of our work can be summarized as follows:
• We propose a complete visual SLAM system called DM-SLAM that combines an instance segmentation network and optical flow information. The system eliminates the influence of dynamic objects on pose estimation in highly dynamic environments and can handle data streams from monocular, stereo, and RGB-D sensors.
• We present two strategies to efficiently extract dynamic points between adjacent frames for RGB-D/stereo camera and monocular camera cases.
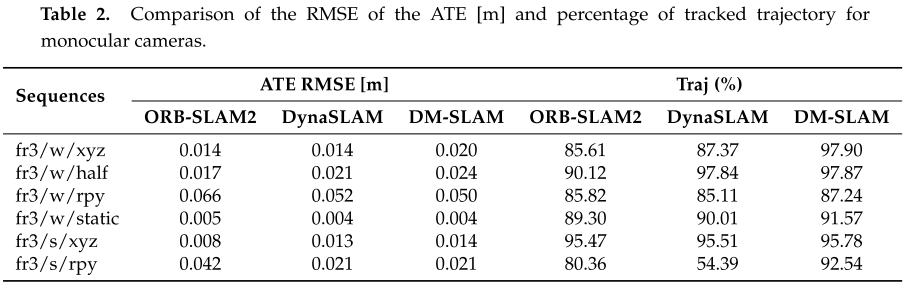
• We evaluate our proposed system on the public TUM and KITTI datasets and achieve good performance in highly dynamic scenarios. The absolute trajectory accuracy of DM-SLAM far outperforms
### 实现




### Improvement
$\xi = ( 1 - \frac{r}{u} )$
where $\xi$ denotes the improvement value, $r$ represents the RMSE value of DM-SLAM, and $u$ represents the RMSE value of ORB-SLAM2.
### Experiments
**RGBD**


**MONO**

**KITI**






### Improvement
$\xi = ( 1 - \frac{r}{u} )$
where $\xi$ denotes the improvement value, $r$ represents the RMSE value of DM-SLAM, and $u$ represents the RMSE value of ORB-SLAM2.
### Experiments
**RGBD**


**MONO**

**KITI**






No comments