
**Missed detection compensation algorithm**(漏检补偿算法):
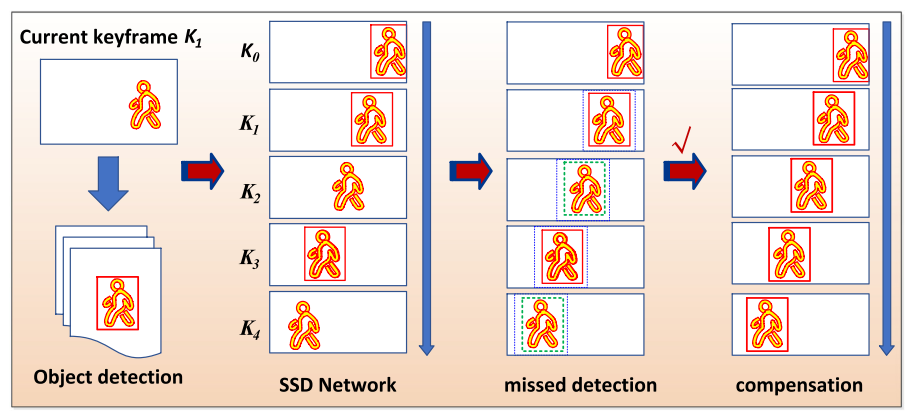
由于目标物体检测并不是那么精确的,会出现漏检等情况,此时可以通过前几帧的检测结果来对当前帧的目标物体的bounding box的位置进行预测。
论文中假设:动态物体在较短时间内的速度变化为常值,加速度为0.
论文中给出了计算公式,不过现在不清楚 $\Delta v$, $\Delta c_i(u,v)$是如何计算的, 以及最后那一项怎么得到?
${}^Ka_i(u,v) = {}^{K-1}c_i(u,v)+\frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u, v)\pm \frac12 a_{max}(u, v)$
${}^K\hat c_i,(u,v) = {}^{K-1} c_i(u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u,v)$
K代表当前帧,K-1为上一帧。
预测区域:${}^KA_i ({}^K a_{i,u}, {}^Ka_{i,v}, {}^{k-1} \hat w, {}^{K-1} \hat h)$ 中点坐标及长与宽
如果与预测区域不重叠,漏检的时候,则使用先前帧进行修补(添加到当前帧中)。
${}^K \hat c_i (u,v) = {}^{K-1} c_i (u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^f c_i(u,v)$
问题:那么这个速度是怎么计算得到的呢?在文中我没有找到答案。
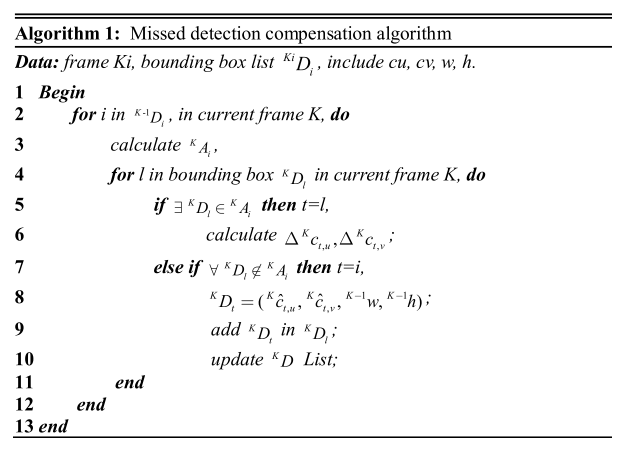
算法大概(Algorithm 1):
遍历上一帧的所有bounding bos, 预测它们在下帧出现的问题。
在当前帧中遍历所有检测到的bouding box,即当前观测值。如果是在预测框范围内,则说明检测到了,反之则说明漏检了,用预测框修补上。
**Seletive Tracking Method**(选择跟踪算法):
本质就是去除动态点,在跟踪时只使用静态特征点。
calculating the aver- age pixel displacement $S_L(u, v)$ of the static feature points in the pixel region L.
使用静态的特征点来算出一个位移均值出来,这个值将作为差别是否为动态特征点的threshold.
$\bar S_L(u,v) = \frac1{N_L} \sum_{i\in L} | \frac 1 Z_{s_i}K exp(\xi_k{}\hat{})P_{si} - \frac 1 Z_{s_i}K exp(\xi_{k-1}{}\hat{})P_{si} |$
问题:哪些点是用作计算的静态特征点?应该先做个假设吧。从算法2 来看,可能是用的mask 为 0
的那些静态点,对应算法2 中的第4行。 (我的理解可能不对)
从算法2 中可看出,如果当前帧中bounding box中心点的位移变化范围大于上面那个threshold时,就可以判断此点为动态点。
# Conclusion
This frame work has three major contributions. Firstly, in view of the low recall rate of the existing SSD object detection network, a missed detection compensation algorithm based on the speed invari- ance in adjacent frames is proposed for SLAM system, which greatly improves the recall rate for detection and provides a good basis for the following module. Secondly, a selective tracking algorithm is proposed to eliminate the dynamic objects in a simple and effective way, which improves the robustness and accuracy of the system. Finally, A feature-based visual Dynamic- SLAM system is constructed. Based on the SSD convolutional neural network, deep learning technology is constructed to a newly object detection thread, which combines prior knowledge to realize the detection of dynamic objects at semantic level in robot localization and mapping.
# References
- Xiao, L., Wang, J., Qiu, X., Rong, Z., & Zou, X. (2019). Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment. Robotics and Autonomous Systems, 117(April), 1–16. https://doi.org/10.1016/j.robot.2019.03.012
- [Paper阅读:Dynamic-SLAM](https://zhuanlan.zhihu.com/p/128472528)

**Missed detection compensation algorithm**(漏检补偿算法):
由于目标物体检测并不是那么精确的,会出现漏检等情况,此时可以通过前几帧的检测结果来对当前帧的目标物体的bounding box的位置进行预测。
论文中假设:动态物体在较短时间内的速度变化为常值,加速度为0.
论文中给出了计算公式,不过现在不清楚 $\Delta v$, $\Delta c_i(u,v)$是如何计算的, 以及最后那一项怎么得到?
${}^Ka_i(u,v) = {}^{K-1}c_i(u,v)+\frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u, v)\pm \frac12 a_{max}(u, v)$
${}^K\hat c_i,(u,v) = {}^{K-1} c_i(u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u,v)$
K代表当前帧,K-1为上一帧。
预测区域:${}^KA_i ({}^K a_{i,u}, {}^Ka_{i,v}, {}^{k-1} \hat w, {}^{K-1} \hat h)$ 中点坐标及长与宽
如果与预测区域不重叠,漏检的时候,则使用先前帧进行修补(添加到当前帧中)。
${}^K \hat c_i (u,v) = {}^{K-1} c_i (u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^f c_i(u,v)$
问题:那么这个速度是怎么计算得到的呢?在文中我没有找到答案。

算法大概(Algorithm 1):
遍历上一帧的所有bounding bos, 预测它们在下帧出现的问题。
在当前帧中遍历所有检测到的bouding box,即当前观测值。如果是在预测框范围内,则说明检测到了,反之则说明漏检了,用预测框修补上。


**Seletive Tracking Method**(选择跟踪算法):
本质就是去除动态点,在跟踪时只使用静态特征点。
calculating the aver- age pixel displacement $S_L(u, v)$ of the static feature points in the pixel region L.
使用静态的特征点来算出一个位移均值出来,这个值将作为差别是否为动态特征点的threshold.
$\bar S_L(u,v) = \frac1{N_L} \sum_{i\in L} | \frac 1 Z_{s_i}K exp(\xi_k{}\hat{})P_{si} - \frac 1 Z_{s_i}K exp(\xi_{k-1}{}\hat{})P_{si} |$
问题:哪些点是用作计算的静态特征点?应该先做个假设吧。从算法2 来看,可能是用的mask 为 0
的那些静态点,对应算法2 中的第4行。 (我的理解可能不对)

从算法2 中可看出,如果当前帧中bounding box中心点的位移变化范围大于上面那个threshold时,就可以判断此点为动态点。

# Conclusion
This frame work has three major contributions. Firstly, in view of the low recall rate of the existing SSD object detection network, a missed detection compensation algorithm based on the speed invari- ance in adjacent frames is proposed for SLAM system, which greatly improves the recall rate for detection and provides a good basis for the following module. Secondly, a selective tracking algorithm is proposed to eliminate the dynamic objects in a simple and effective way, which improves the robustness and accuracy of the system. Finally, A feature-based visual Dynamic- SLAM system is constructed. Based on the SSD convolutional neural network, deep learning technology is constructed to a newly object detection thread, which combines prior knowledge to realize the detection of dynamic objects at semantic level in robot localization and mapping.
# References
- Xiao, L., Wang, J., Qiu, X., Rong, Z., & Zou, X. (2019). Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment. Robotics and Autonomous Systems, 117(April), 1–16. https://doi.org/10.1016/j.robot.2019.03.012
- [Paper阅读:Dynamic-SLAM](https://zhuanlan.zhihu.com/p/128472528)
Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment [论文阅读]
[toc]
# 2020 Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment
**contributions**:
• In view of the low recall rate of the existing SSD object detection network, a missed detection compensation algo- rithm based on the speed invariance in adjacent frames is proposed for SLAM system, which greatly improves the recall rate for detection and provides a good basis for the following module.
• A selection tracking algorithm is proposed to eliminate the dynamic objects in a simple and effective way, which im- proves the robustness and accuracy of the system.
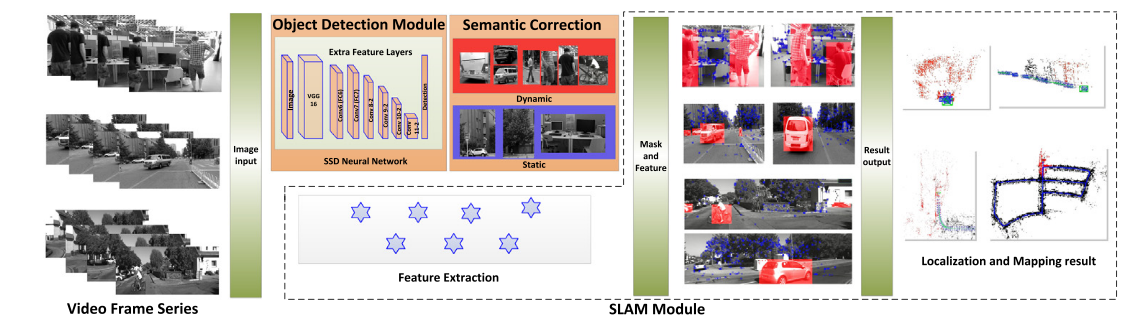
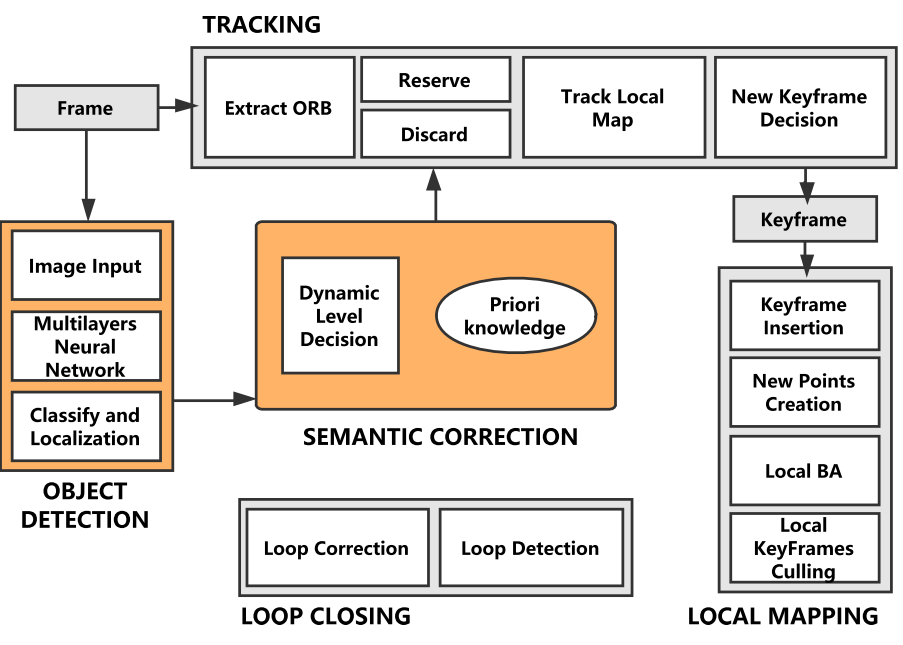
• A feature-based visual Dynamic-SLAM system is constructed. Based on the SSD convolutional neural net- work, deep learning technology is constructed to a newly object detection thread, which combines prior knowledge to realize the detection of dynamic objects at semantic level in robot localization and mapping.
(引用 https://zhuanlan.zhihu.com/p/128472528 这位大牛的翻译,翻译的挺好的, 如有侵权,请联系我删除:)
本文的主要三大贡献:
1. 针对SLAM系统提出了一种基于相邻帧速度不变性的丢失检测补偿算法,提高SSD的recall rate,为后续模块提供了良好的依据。
2. 提出了一种选择跟踪算法,以一种简单有效的方式消除动态对象,提高了系统的鲁棒性和准确性。
3. 构建了基于特征的可视化动态SLAM系统。 构建了基于SSD的目标检测模块线程,并将其检测结果作为先验知识提升SLAM性能。

**Missed detection compensation algorithm**(漏检补偿算法):
由于目标物体检测并不是那么精确的,会出现漏检等情况,此时可以通过前几帧的检测结果来对当前帧的目标物体的bounding box的位置进行预测。
论文中假设:动态物体在较短时间内的速度变化为常值,加速度为0.
论文中给出了计算公式,不过现在不清楚 $\Delta v$, $\Delta c_i(u,v)$是如何计算的, 以及最后那一项怎么得到?
${}^Ka_i(u,v) = {}^{K-1}c_i(u,v)+\frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u, v)\pm \frac12 a_{max}(u, v)$
${}^K\hat c_i,(u,v) = {}^{K-1} c_i(u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u,v)$
K代表当前帧,K-1为上一帧。
预测区域:${}^KA_i ({}^K a_{i,u}, {}^Ka_{i,v}, {}^{k-1} \hat w, {}^{K-1} \hat h)$ 中点坐标及长与宽
如果与预测区域不重叠,漏检的时候,则使用先前帧进行修补(添加到当前帧中)。
${}^K \hat c_i (u,v) = {}^{K-1} c_i (u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^f c_i(u,v)$
问题:那么这个速度是怎么计算得到的呢?在文中我没有找到答案。

算法大概(Algorithm 1):
遍历上一帧的所有bounding bos, 预测它们在下帧出现的问题。
在当前帧中遍历所有检测到的bouding box,即当前观测值。如果是在预测框范围内,则说明检测到了,反之则说明漏检了,用预测框修补上。


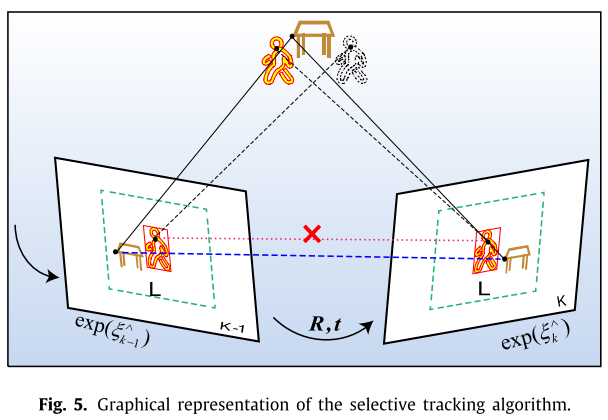
**Seletive Tracking Method**(选择跟踪算法):
本质就是去除动态点,在跟踪时只使用静态特征点。
calculating the aver- age pixel displacement $S_L(u, v)$ of the static feature points in the pixel region L.
使用静态的特征点来算出一个位移均值出来,这个值将作为差别是否为动态特征点的threshold.
$\bar S_L(u,v) = \frac1{N_L} \sum_{i\in L} | \frac 1 Z_{s_i}K exp(\xi_k{}\hat{})P_{si} - \frac 1 Z_{s_i}K exp(\xi_{k-1}{}\hat{})P_{si} |$
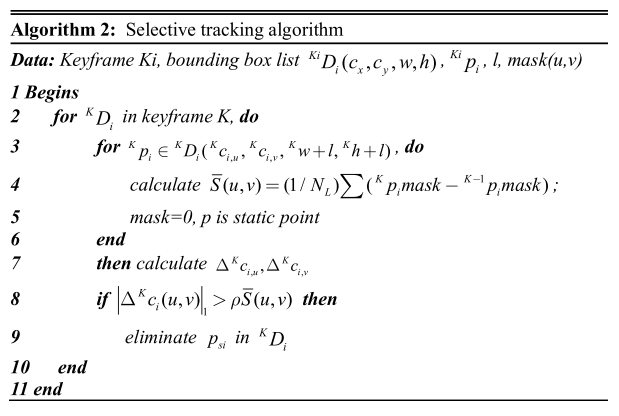
问题:哪些点是用作计算的静态特征点?应该先做个假设吧。从算法2 来看,可能是用的mask 为 0
的那些静态点,对应算法2 中的第4行。 (我的理解可能不对)

从算法2 中可看出,如果当前帧中bounding box中心点的位移变化范围大于上面那个threshold时,就可以判断此点为动态点。

# Conclusion
This frame work has three major contributions. Firstly, in view of the low recall rate of the existing SSD object detection network, a missed detection compensation algorithm based on the speed invari- ance in adjacent frames is proposed for SLAM system, which greatly improves the recall rate for detection and provides a good basis for the following module. Secondly, a selective tracking algorithm is proposed to eliminate the dynamic objects in a simple and effective way, which improves the robustness and accuracy of the system. Finally, A feature-based visual Dynamic- SLAM system is constructed. Based on the SSD convolutional neural network, deep learning technology is constructed to a newly object detection thread, which combines prior knowledge to realize the detection of dynamic objects at semantic level in robot localization and mapping.
# References
- Xiao, L., Wang, J., Qiu, X., Rong, Z., & Zou, X. (2019). Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment. Robotics and Autonomous Systems, 117(April), 1–16. https://doi.org/10.1016/j.robot.2019.03.012
- [Paper阅读:Dynamic-SLAM](https://zhuanlan.zhihu.com/p/128472528)

**Missed detection compensation algorithm**(漏检补偿算法):
由于目标物体检测并不是那么精确的,会出现漏检等情况,此时可以通过前几帧的检测结果来对当前帧的目标物体的bounding box的位置进行预测。
论文中假设:动态物体在较短时间内的速度变化为常值,加速度为0.
论文中给出了计算公式,不过现在不清楚 $\Delta v$, $\Delta c_i(u,v)$是如何计算的, 以及最后那一项怎么得到?
${}^Ka_i(u,v) = {}^{K-1}c_i(u,v)+\frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u, v)\pm \frac12 a_{max}(u, v)$
${}^K\hat c_i,(u,v) = {}^{K-1} c_i(u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^fc_i(u,v)$
K代表当前帧,K-1为上一帧。
预测区域:${}^KA_i ({}^K a_{i,u}, {}^Ka_{i,v}, {}^{k-1} \hat w, {}^{K-1} \hat h)$ 中点坐标及长与宽
如果与预测区域不重叠,漏检的时候,则使用先前帧进行修补(添加到当前帧中)。
${}^K \hat c_i (u,v) = {}^{K-1} c_i (u,v) + \frac1k \sum_{f=K-1}^{K-k} \Delta^f c_i(u,v)$
问题:那么这个速度是怎么计算得到的呢?在文中我没有找到答案。

算法大概(Algorithm 1):
遍历上一帧的所有bounding bos, 预测它们在下帧出现的问题。
在当前帧中遍历所有检测到的bouding box,即当前观测值。如果是在预测框范围内,则说明检测到了,反之则说明漏检了,用预测框修补上。


**Seletive Tracking Method**(选择跟踪算法):
本质就是去除动态点,在跟踪时只使用静态特征点。
calculating the aver- age pixel displacement $S_L(u, v)$ of the static feature points in the pixel region L.
使用静态的特征点来算出一个位移均值出来,这个值将作为差别是否为动态特征点的threshold.
$\bar S_L(u,v) = \frac1{N_L} \sum_{i\in L} | \frac 1 Z_{s_i}K exp(\xi_k{}\hat{})P_{si} - \frac 1 Z_{s_i}K exp(\xi_{k-1}{}\hat{})P_{si} |$
问题:哪些点是用作计算的静态特征点?应该先做个假设吧。从算法2 来看,可能是用的mask 为 0
的那些静态点,对应算法2 中的第4行。 (我的理解可能不对)

从算法2 中可看出,如果当前帧中bounding box中心点的位移变化范围大于上面那个threshold时,就可以判断此点为动态点。

# Conclusion
This frame work has three major contributions. Firstly, in view of the low recall rate of the existing SSD object detection network, a missed detection compensation algorithm based on the speed invari- ance in adjacent frames is proposed for SLAM system, which greatly improves the recall rate for detection and provides a good basis for the following module. Secondly, a selective tracking algorithm is proposed to eliminate the dynamic objects in a simple and effective way, which improves the robustness and accuracy of the system. Finally, A feature-based visual Dynamic- SLAM system is constructed. Based on the SSD convolutional neural network, deep learning technology is constructed to a newly object detection thread, which combines prior knowledge to realize the detection of dynamic objects at semantic level in robot localization and mapping.
# References
- Xiao, L., Wang, J., Qiu, X., Rong, Z., & Zou, X. (2019). Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment. Robotics and Autonomous Systems, 117(April), 1–16. https://doi.org/10.1016/j.robot.2019.03.012
- [Paper阅读:Dynamic-SLAM](https://zhuanlan.zhihu.com/p/128472528)




No comments