
 ## RGDB AR Demo
- Source code:
```cpp
#include
## RGDB AR Demo
- Source code:
```cpp
#include ORB-SLAM3 AR Demo
# ORB-SLAM3 AR Demo
## Monocular
- Compile ORB-SLAM3 and make sure it can run in ROS
```sh
cd [PROJECT]
catkin_make
```
- Run ORB-SLAM3 MonoAR node
```sh
$rosrun orb_slam3 MonoAR Vocabulary/ORBvoc.tx Examples/ROS/ORB_SLAM3/config/ros_tum.yaml /camera/image_raw:=/camera/rgb/image_color
```
- Play dataset
For example, TUM1:
```sh
rosbag play --clock rgbd_dataset_freiburg1_room.bag --hz=1
```
- Insert virtual 3D object
## RGDB AR Demo
- Source code:
```cpp
#include
#include
#include
#include
#include <cv_bridge/cv_bridge.h>
#include <message_filters/subscriber.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/time_synchronizer.h>
#include <ros/ros.h>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "../../../include/System.h"
#include "ViewerAR.h"
using namespace std;
ORB_SLAM3::ViewerAR viewerAR;
bool bRGB = true;
cv::Mat K;
cv::Mat DistCoef;
class ImageGrabber {
public:
ImageGrabber(ORB_SLAM3::System* pSLAM)
: mpSLAM(pSLAM)
{
}
void GrabRGBD(const sensor_msgs::ImageConstPtr& msgRGB, const sensor_msgs::ImageConstPtr& msgD);
ORB_SLAM3::System* mpSLAM;
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "Mono");
ros::start();
if (argc != 3) {
cerr << endl
<< "Usage: rosrun ORB_SLAM3 RGBD path_to_vocabulary path_to_settings" << endl;
ros::shutdown();
return 1;
}
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM3::System SLAM(argv[1], argv[2], ORB_SLAM3::System::RGBD, false);
cout << endl
<< endl;
cout << "-----------------------" << endl;
cout << "Augmented Reality Demo" << endl;
cout << "1) Translate the camera to initialize SLAM." << endl;
cout << "2) Look at a planar region and translate the camera." << endl;
cout << "3) Press Insert Cube to place a virtual cube in the plane. " << endl;
cout << endl;
cout << "You can place several cubes in different planes." << endl;
cout << "-----------------------" << endl;
cout << endl;
viewerAR.SetSLAM(&SLAM);
ImageGrabber igb(&SLAM);
ros::NodeHandle nh;
// ros::Subscriber sub = nh.subscribe("/camera/image_raw", 1, &ImageGrabber::GrabRGBD, &igb);
message_filters::Subscriber rgb_sub(nh, "/camera/rgb/image_color", 1);
message_filters::Subscriber depth_sub(nh, "/camera/depth/image", 1);
typedef message_filters::sync_policies::ApproximateTime sync_pol;
message_filters::Synchronizer sync(sync_pol(10), rgb_sub, depth_sub);
sync.registerCallback(boost::bind(&ImageGrabber::GrabRGBD, &igb, _1, _2));
cv::FileStorage fSettings(argv[2], cv::FileStorage::READ);
bRGB = static_cast((int)fSettings["Camera.RGB"]);
float fps = fSettings["Camera.fps"];
viewerAR.SetFPS(fps);
float fx = fSettings["Camera.fx"];
float fy = fSettings["Camera.fy"];
float cx = fSettings["Camera.cx"];
float cy = fSettings["Camera.cy"];
viewerAR.SetCameraCalibration(fx, fy, cx, cy);
K = cv::Mat::eye(3, 3, CV_32F);
K.at(0, 0) = fx;
K.at(1, 1) = fy;
K.at(0, 2) = cx;
K.at(1, 2) = cy;
DistCoef = cv::Mat::zeros(4, 1, CV_32F);
DistCoef.at(0) = fSettings["Camera.k1"];
DistCoef.at(1) = fSettings["Camera.k2"];
DistCoef.at(2) = fSettings["Camera.p1"];
DistCoef.at(3) = fSettings["Camera.p2"];
const float k3 = fSettings["Camera.k3"];
if (k3 != 0) {
DistCoef.resize(5);
DistCoef.at(4) = k3;
}
thread tViewer = thread(&ORB_SLAM3::ViewerAR::Run, &viewerAR);
ros::spin();
// Stop all threads
SLAM.Shutdown();
// Save camera trajectory
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
ros::shutdown();
return 0;
}
void ImageGrabber::GrabRGBD(const sensor_msgs::ImageConstPtr& msgRGB, const sensor_msgs::ImageConstPtr& msgD)
{
// Copy the ros image message to cv::Mat.
cv_bridge::CvImageConstPtr cv_ptrRGB;
try {
cv_ptrRGB = cv_bridge::toCvShare(msgRGB);
} catch (cv_bridge::Exception& e) {
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
cv_bridge::CvImageConstPtr cv_ptrD;
try {
cv_ptrD = cv_bridge::toCvShare(msgD);
} catch (cv_bridge::Exception& e) {
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
cv::Mat im = cv_ptrRGB->image.clone();
cv::Mat imu;
cv::Mat Tcw = mpSLAM->TrackRGBD(cv_ptrRGB->image, cv_ptrD->image, cv_ptrRGB->header.stamp.toSec());
int state = mpSLAM->GetTrackingState();
vector vMPs = mpSLAM->GetTrackedMapPoints();
vector vKeys = mpSLAM->GetTrackedKeyPointsUn();
cv::undistort(im, imu, K, DistCoef);
if (bRGB)
viewerAR.SetImagePose(imu, Tcw, state, vKeys, vMPs);
else {
cv::cvtColor(imu, imu, CV_RGB2BGR);
viewerAR.SetImagePose(imu, Tcw, state, vKeys, vMPs);
}
}
```
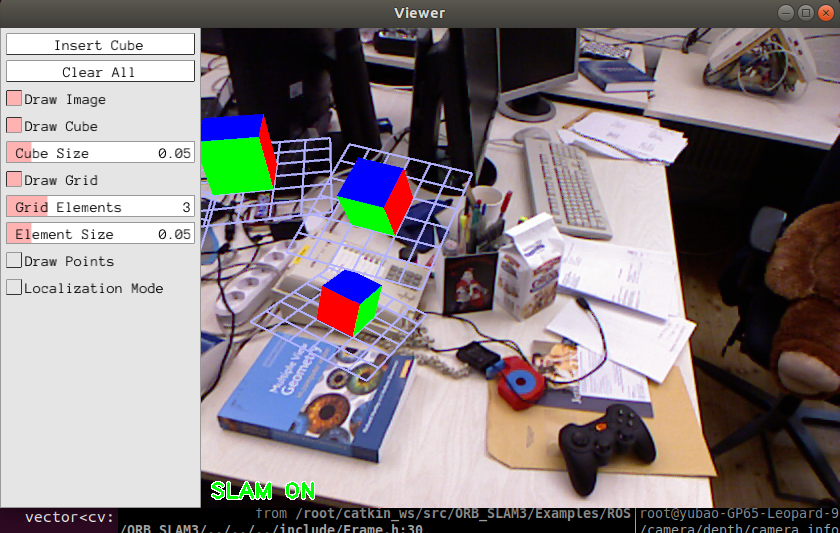
- RGBD AR Demo
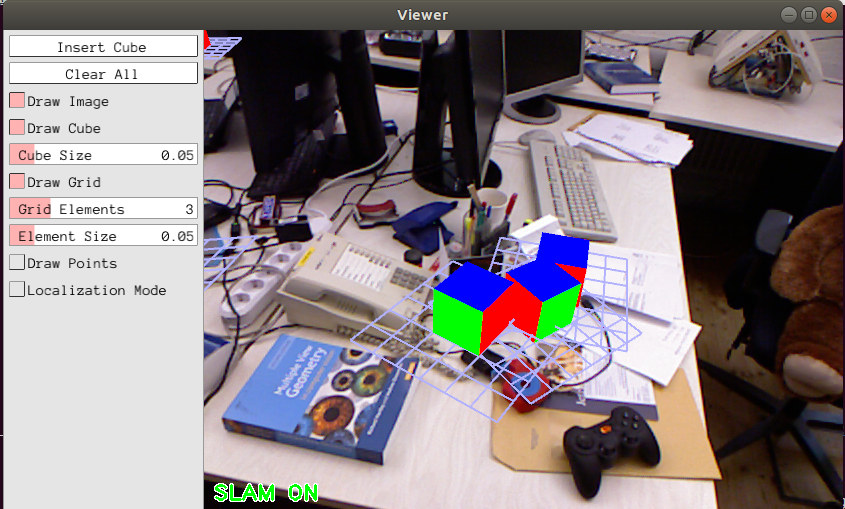
## USB camera
```sh
Augmented Reality Demo
1) Translate the camera to initialize SLAM.
2) Look at a planar region and translate the camera.
3) Press Insert Cube to place a virtual cube in the plane.
```
## RGDB AR Demo
- Source code:
```cpp
#include 



No comments